
Automated Navigation System Wheelchair for HD Patients
Please consult healthcare professionals when deciding what types of assistive technology will best serve your needs.
The parts of the brain most affected by Huntington’s disease (HD), the basal ganglia, are groups of neurons at the base of the brain. Basal ganglia are responsible for the motor movements of the muscles in the body. When cells in basal ganglia die, a common pathological symptom of HD, patients experience uncontrollable muscular movements like tremors and fallings. HD patients will need assistance of a wheelchair towards the end stage of the disorder when the movements become debilitating, and the falls become more prevalent. When they are unable to get up and move around on their own, wheelchairs become important mechanisms of transport.This article will describe a wheelchair-based technology as one example of how the field of assistive technology research is expanding.
An electric wheelchair by Dr. Yodchanan Wongsawat from Center for Biomedical and Robotics Technology Faculty of Engineering at Mahidol University in Thailand is designed specifically for disabled patients with limited hand mobility. This prototype wheelchair has an automated navigation system that could safely navigate and facilitate comfort to the disabled patients, including those with Huntington’s disease. The electric wheelchair accommodates a variety of conditions. If their hands are still functional, a patient could use their hands; otherwise, the modes can be operated by one’s chin or eye controls if the patient’s hands and chin are paralyzed or unable to function due to a debilitating movement disorder. These functions are explained further in details below. The wheelchair can be automatically navigated to the destination on the pre-located mapping. Moreover, through the automated navigation system, the obstacles can be detected and avoided safely.
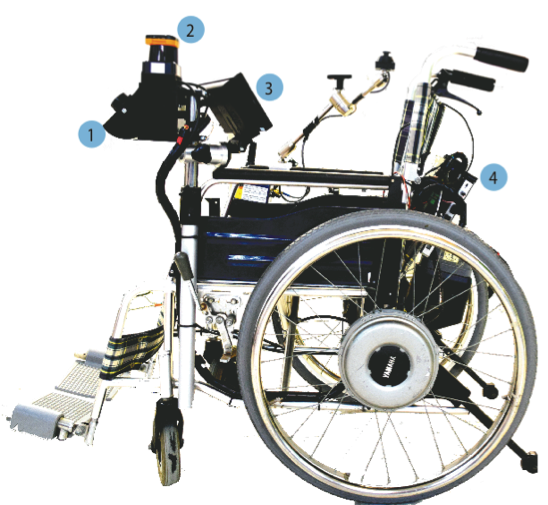
The Automated Navigation System Wheelchair is made of these components:
- Rotating Laser Scanner: use for detecting the obstacles on the floor
- Laser Scanner: use for wheelchair localization, obstacle detection and mapping
- 7’’ LCD screen: come with user friendly interface together with command description
- Mini-PC: data acquisition and wireless communication device with server
Source: Brain Control Wheelchair poster from BCI lab Mahidol, Download date 9/24/15

Source: Brain Control Wheelchair poster from BCI lab Mahidol, Download date 9/24/15
Alternative Input Mode
- Eye Module
- Chin Module
- Hand Joystick Module
- Brain Module
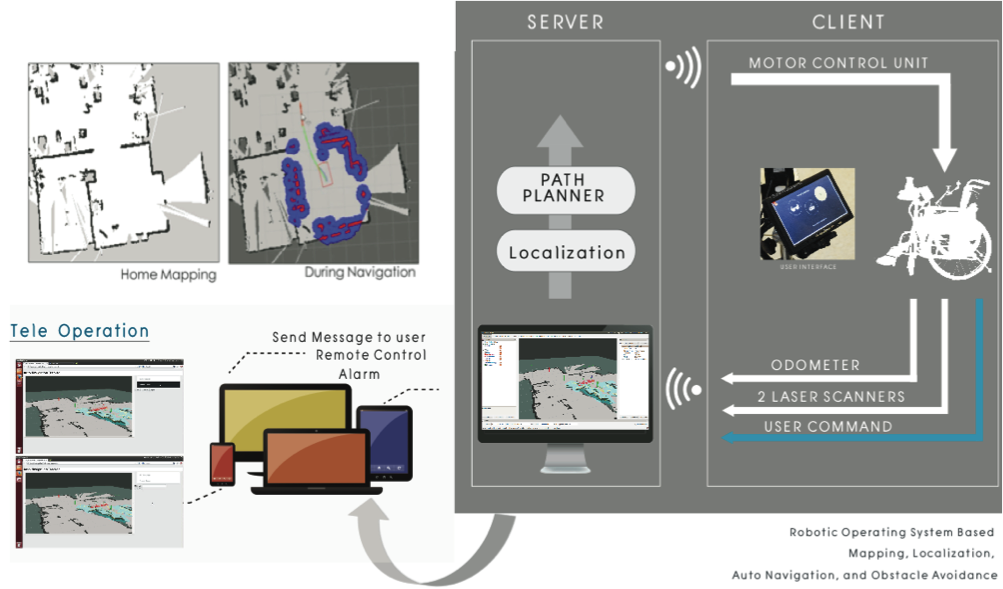
Before initiating the automatic navigation task, the system needs to build a static map and define the users’ most frequent locations. These locations can be selected in the different choices of the automatic navigation mode. The information from odometers (which indicate distance traveled) and laser scanners are used for map building, which is based on a mapping technique, the enhanced simultaneous localization and mapping (SLAM) system. The most frequent users’ locations can be recorded, which is then used to build the static or a fixed map. In order to navigate the wheelchair from one location to the desired destination, the Robot Operating System (ROS) based navigation system will calculate a possible path using global path planning and control the wheelchair by the command velocity from the local path planning. During wheelchair navigation, the system can localize the wheelchair location by the Monte Carlo localization adaptive approach. The obstacles can be detected using the Tilt scanner. Once an obstacle appears, the ROS based navigation system can calculate a new path and safely continue navigating the wheelchair to desired destination.
Source: Brain Control Wheelchair poster from BCI Mahidol Lab, Download date 9/24/15
Source: Brain Control Wheelchair from BCI Mahidol Lab, Download date: 9/24/15
In conclusion, the electronic wheelchair has many applications for HD patients, especially for those at the end stage of the disorder when the movements become debilitating, and the falls become more prevalent. This wheelchair is just a prototype and has not been mass-produced.